

杠杆平衡的原理
1、杠杆原理就是“杠杆平衡条件”。要使杠杆平衡,作用在杠杆上的两个力(动力和阻力)的大小跟它们的力臂成反比。动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2。式中。F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。
2、杠杆平衡条件为动力×动力臂=阻力×阻力臂。杠杆平衡条件也叫杠杆原理,是物理学中非常基础且重要的原理之一。这个条件是指在杠杆达到平衡状态时,作用在杠杆上的动力和阻力需要满足一定的关系。具体来说,动力是使杠杆向某一方向转动的力,而阻力则是阻碍杠杆转动的力。
3、阿基米德发现了杠杆原理,即“二重物平衡时,它们离支点的距离与重量成反比。阿基米德对杠杆的研究不仅仅停留在理论方面,而且据此原理还进行了一系列的发明创造。
4、杠杆平衡原理:当杠杆受到相反方向上的力偶作用时,能保持静止或做匀速直线运动的状态。具体解释如下:杠杆平衡的基本原理 杠杆平衡是指在受到相反方向的力矩作用下,杠杆达到的一种动态平衡状态。简单来说,就是杠杆在受到外力作用时,能够保持静止或者做匀速直线运动。
杠杆的原理的原理是什么?
1、杠杆原理是利用杠杆的作用,通过调整力的大小和方向来实现力的放大或方向的改变的原理。详细解释 杠杆原理是力学中的一个基本原理,它描述了通过杠杆的运用可以实现力的放大或方向的改变。杠杆由一个支点和两个力臂组成,其中支点是杠杆的旋转轴,两个力臂分别是力的作用位置到支点的距离。
2、杠杆原理是指通过支点,利用动力臂和阻力臂之间的力矩平衡关系,达到撬动重物或实现其他功能的目的。其基本原理可以用以下三点概括: 支点的确立 杠杆工作的基础是支点的选择。支点确定了力和力矩的作用位置,是杠杆运动的关键点。通过改变支点的位置,可以调整杠杆的工作效率和所需的力的大小。
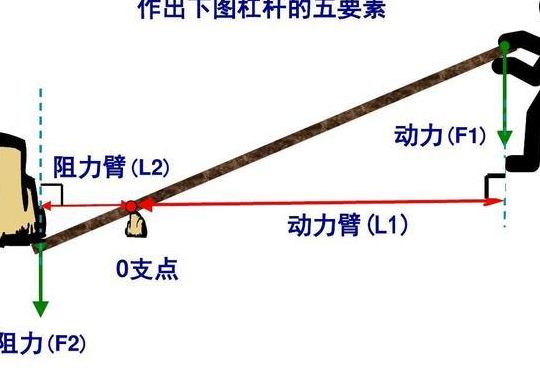
3、杠杆原理是作用在杠杆上的两个力矩(力与力臂的乘积)大小必须相等。即:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。因此要使杠杆达到平衡,动力臂是阻力臂的几倍,阻力就是动力的几倍。
4、杠杆原理公式:动力×动力臂=阻力×阻力臂,即:F1×L1=F2×L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂,杠杆原理也叫做“杠杆平衡条件”。要使杠杆平衡,作用在杠杆上的两个力(用力点、支点和阻力点)的大小跟它们的力臂成反比。
5、杠杆原理是一种物理原理,它描述了一种能够在力的作用下,通过一定的机械装置放大或改变力的方向的原理。这一原理的应用十分广泛,而杠杆就是其最基础的体现之一。杠杆是一种简单的机械装置,它由一个支点和一个或多个力点组成。
杠杆平衡原理公式
1、杠杆原理公式:动力×动力臂=阻力×阻力臂,即:F1×L1=F2×L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂,杠杆原理也叫做“杠杆平衡条件”。要使杠杆平衡,作用在杠杆上的两个力(用力点、支点和阻力点)的大小跟它们的力臂成反比。
2、杠杆平衡原理公式如下:F1· L1=F2·L2。杠杆平衡条件:杠杆的动力乘动力臂等于阻力乘阻力臂,即杠杆的动力臂是阻力臂的几倍,杠杆的动力F1就是阻力F2的几分之一,这就是杠杆的平衡条件。要使杠杆平衡,作用在杠杆上的两个力(动力和阻力)的大小跟它们的力臂成反比。
3、即:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。从上式可看出,要使杠杆达到平衡,动力臂是阻力臂的几倍,阻力就是动力的几倍。生活中很多方面都是采用杠杆原理,比如扫把、撬动东西等。
4、平衡条件的公式是动力×动力臂=阻力×阻力臂,用代数式表示为F1xl1=F2xl2,在式中,F1表示动力,l1表示动力臂,F2表示阻力,l2表示阻力臂。
5、F1*L1=F2*L2力乘以力臂等于力乘以力臂 杠杆平衡条件:F1*l1=F2*l2。
杠杆原理公式是什么?
1、杠杆原理公式:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2,式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。从上式可看出,要使杠杆达到平衡,动力臂是阻力臂的几倍,阻力就是动力的几倍。来源于《论平面图形的平衡》。
2、杠杆原理公式:动力×动力臂=阻力×阻力臂,即:F1×L1=F2×L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂,杠杆原理也叫做“杠杆平衡条件”。要使杠杆平衡,作用在杠杆上的两个力(用力点、支点和阻力点)的大小跟它们的力臂成反比。
3、杠杆原理是作用在杠杆上的两个力矩(力与力臂的乘积)大小必须相等。即:动力×动力臂=阻力×阻力臂,用代数式表示为F1·L1=F2·L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂。因此要使杠杆达到平衡,动力臂是阻力臂的几倍,阻力就是动力的几倍。
4、杠杆原理公式为:动力×动力臂=阻力×阻力臂,即:F1×L1=F2×L2。式中,F1表示动力,L1表示动力臂,F2表示阻力,L2表示阻力臂,杠杆原理也叫做“杠杆平衡条件”。财务管理中的杠杆原理,是指由于固定费用(包括固定成本和利息)的存在,当某一指标发生较小的变化时,会使另一相关指标产生比较大的变化。
5、杠杆定律公式:F1 × L1 = F2 × L2 其中,F1和F2表示两个力,L1和L2表示两个力臂。假设有一个物体由两个相组成,每个相的质量分别为m1和m2,组成物的总质量为M。每个相的体积分别为V1和V2,组成物的总体积为V。每个相的密度分别为ρ1和ρ2,组成物的平均密度为ρ。
6、杠杆原理公式:功率×功率臂=阻力×阻力臂由代数公式F1·l1=f2·L2表示,其中F1表示功率,l1表示动力臂,f2表示阻力,L2表示阻力臂。由上式可以看出,要平衡杠杆,动力臂是阻力臂的数倍,阻力是动力臂的数倍。来自“on the balance of plane graphics”。
杠杆原理是什么
杠杆原理的意思是指,在杠杆上施加一定的力量,通过杠杆的作用,可以放大这个力量,使其作用在另一端产生更大的效果。这个原理涉及到力学中的力矩原理,即力和力臂的乘积决定了力的作用效果。杠杆原理广泛应用于各种机械装置和工具中,人们通过设计和运用不同的杠杆系统来实现不同的功能和目的。
杠杆原理是一种物理学的原理,指的是通过一定的支点,利用力的作用,使得较小力可以产生较大的力矩,从而实现力量的放大或平衡的效果。这种原理主要涉及到力矩的概念,即通过力的应用点和力的长度以及作用角度的不同而产生不同的转动效果。在物理学中,杠杆原理被广泛用于解释各种机械装置的工作原理。
杠杆原理的意思是指,在杠杆的使用过程中,通过支点、力和动力臂与阻力臂的关系,实现力的放大或缩小,从而达到更轻松地进行工作或操作的目的。杠杆原理是物理学中非常基础且重要的一条原理。它描述的是一种能够四两拨千斤的简单机械结构。具体来说,杠杆主要包括支点、动力臂和阻力臂三个部分。
杠杆原理 杠杆原理是指通过力的作用,将力量从一个点传递到另一个点,从而实现物体的移动或平衡的一种物理原理。该原理基于力矩的概念,即力和力的转动效应的乘积。通过巧妙运用杠杆原理,人们可以用较小的力量去驱动较大的负载,或者通过改变力的方向来实现某些操作。下面详细解释杠杆原理的相关内容。
文章声明:以上内容(如有图片或视频亦包括在内)除非注明,否则均为网友提供或互联网,转载或复制请以超链接形式并注明出处。





