

转弯半径是什么
1、转弯半径(RADIUS OF TURNING CIRCLE),是指汽车行驶过程中,由转向中心到前外转向轮与地面接触点的距离。
2、车辆转向时,从瞬时转向中心到前外轮轨迹中心线的距离称为转弯半径,二倍的半径即为转弯直径(D),轴距L是一个不变值。因此在外轮摆转角α最大时D最小。
3、转弯半径指的是 汽车行驶过程中由转向中心到前外转向轮与地面接触点的距离。当方向盘转到极限位置时,由转向中心到前外转向轮接地中心的距离称为最小转弯半径。
4、转弯半径(RADIUS OF TURNING CIRCLE) 指方向盘转向极限时外前轮轨迹的圆半径。转弯半径在很大程度上代表了汽车通过狭窄的弯曲区域或绕过障碍物的能力。转弯半径直接影响汽车的机动性。
道路转弯半径怎么计算
1、道路转弯半径计算公式为:Mv^2/r=μMg。μ是摩擦系数,具体要看轮胎质量和路面情况(正常干燥沥青路面的摩擦系数为0.6,雨天路面摩擦系数降为0.4,雪天则为0.28,结冰路面就更低,只有0.18)。
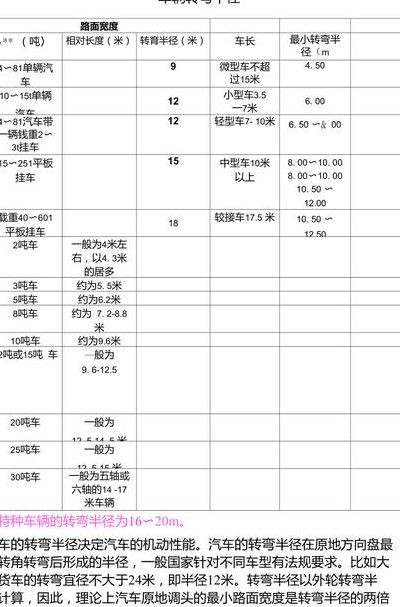
2、R=车辆最小转弯半径;L=车长;W=车宽;D=车辆最小转弯道宽度;Ψ=车辆方向最大转角。该公式的简化版(经验计算)算法是:4×L,其中L是车场。
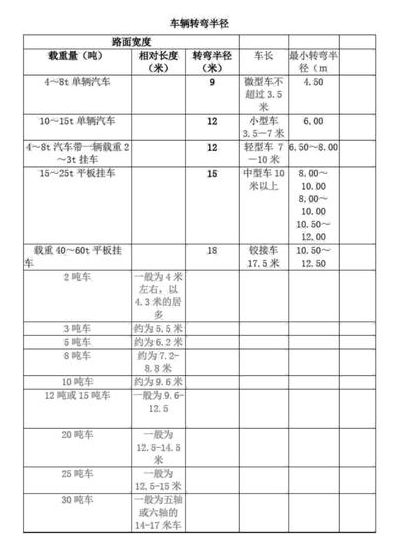
3、汽车最小转弯半径与车辆宽度无关,与车长有关,但转弯道宽度与车宽有关,具体计算如下:R=L / 2(Sinψ);D=W+2R(1-Cosψ)。
转弯半径是指什么?
转弯半径指的是 汽车行驶过程中由转向中心到前外转向轮与地面接触点的距离。当方向盘转到极限位置时,由转向中心到前外转向轮接地中心的距离称为最小转弯半径。
转弯半径(RADIUS OF TURNING CIRCLE),是指汽车行驶过程中,由转向中心到前外转向轮与地面接触点的距离。
转弯半径定义:汽车由转向中心到外转向轮与地面接触点的距离。
转弯半径是汽车的主要技术性能参数,是指车辆转弯时,(将方向盘朝一个方向转到极限位置后),行驶车辆在平面(地面)上画出的轨迹圆的半径(外转向轮的轨迹)。
如何计算弯道的半径?
1、道路转弯半径计算公式为:Mv^2/r=μMg。μ是摩擦系数,具体要看轮胎质量和路面情况(正常干燥沥青路面的摩擦系数为0.6,雨天路面摩擦系数降为0.4,雪天则为0.28,结冰路面就更低,只有0.18)。
2、弯曲半径乘以圆周率14 除以圆周360乘以弯曲角度。等于弯管部分的实际长度,加上两边直线段,误差最多1mm。弯管弯曲部分的展开长度可按下式进行计算:L=πaR/180=0.01745aR式中L——弯曲部分的展开长度(mm)。
3、管道弯头的半径计算方法如下:半径 = 周长 ÷ 2 ÷ π(14)依据是:圆周率。圆周率为圆的周长与直径的比值,一般用希腊字母π(读作pài)表示,π为一个常数(约等于141592654),代表圆周长和直径的比值。
什么是汽车转弯半径
转弯半径(RADIUS OF TURNING CIRCLE) 指方向盘转向极限时外前轮轨迹的圆半径。转弯半径在很大程度上代表了汽车通过狭窄的弯曲区域或绕过障碍物的能力。转弯半径直接影响汽车的机动性。
转弯半径(RADIUS OF TURNING CIRCLE),是指汽车行驶过程中,由转向中心到前外转向轮与地面接触点的距离。
指当方向盘转到极限位置时,外侧前轮轨迹圆半径.转弯半径在很大程度上表征了汽车能够通过狭窄弯曲地带或绕开不可越过障碍物的能力.转弯半径越小,汽车的机动性能越好.转向盘转到极限位置时的转弯半径为最小转弯半径。
汽车转弯半径是:定义一:汽车转弯半径是指当方向盘转到极限位置时外侧前轮轨迹的圆半径。定义二:汽车由转向中心到外转向轮与地面接触点的距离。
汽车的转弯半径是由转向中心到前外转向轮与地面接触点的距离。转弯半径(RADIUS OF TURNING CIRCLE),是指汽车行驶过程中,由转向中心到前外转向轮与地面接触点的距离。
道路宽4.5米,90度转弯,道路的转弯半径是多少?怎么计算的?
1、道路中心线到圆心的距离。道路工程上有从两边直线时的交点量截距,查表。
2、道路转弯半径计算公式为:Mv^2/r=μMg。μ是摩擦系数,具体要看轮胎质量和路面情况(正常干燥沥青路面的摩擦系数为0.6,雨天路面摩擦系数降为0.4,雪天则为0.28,结冰路面就更低,只有0.18)。
3、步骤一:确定车辆的转弯角度(通常以度为单位)。这可能是通过方向盘的旋转角度来估计或者通过已知道的转弯半径和车辆的轮距计算得出。 步骤二:测量车辆从初始位置开始到完成转弯所行驶的弓形路径的外缘长度。
4、车辆(最小)转弯半径计算公式:R=L/2(Sinψ);D=W+2R(1-Cosψ);R=车辆最小转弯半径;L=车长;W=车宽;D=车辆最小转弯道宽度;Ψ=车辆方向最大转角。算法是:4*L,其中L是车场。
文章声明:以上内容(如有图片或视频亦包括在内)除非注明,否则均为网友提供或互联网,转载或复制请以超链接形式并注明出处。




