

六自由度振动台
1、六自由度运动平台原理 是由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2、最大扭转角: 三向均为±3度 工作频段: 0.1~50Hz 控制模式及数据获取:数字控制 振动方向: 空间六自由度 振动波形: 地震波、随机波、简谐波等 加速度及应变测量数据的采集采用STEXⅢ型数据采集器,采样频率256Hz,共108个采样通道。
3、由于六自由度运动平台的研制,涉及机械、液压、电气、控制、计算机、传感器,空间运动数学模型、实时信号传输处理、图形显示、动态仿真等等一系列高科技领域,因而六自由度运动平台的研制变成了高等院校、研究院所在液压和控制领域水平的标志性象征。
如何计算滚动摩擦力?
1、滑动摩擦力=正压力×摩擦系数 F=N×μ F表示滑动摩擦力,N表示正压力,μ表示摩擦系数。
2、摩擦力的公式: f=μ×Fn (FN:正压力(不一定等于施力物体的重力)摩擦力就是物体在不光滑表面发生相对平移或有相对平移趋势所产生的相反作用力,而摩擦力的大小决定于两个值。垂直压力和摩擦系数。
3、滑动摩擦力的计算公式可以使用库仑摩擦力公式:F = μN 其中,F是摩擦力(单位:牛顿,N),μ是摩擦系数(无单位),N是法向压力(单位:牛顿,N)。摩擦系数μ可以根据实际情况有不同的取值,例如:- 对于干净的金属表面之间的滑动摩擦,μ一般在0.1~0.6之间。
4、在计算滚动摩擦力时,可以使用以下公式:F = μ * N 其中,F是滚动摩擦力,μ是滚动摩擦系数,N是法向反力。滚动摩擦系数是一个实验常数,它反映了物体表面的粗糙度和滚动接触面的形状对滚动摩擦力的影响。在给定的条件下,滚动摩擦系数可以通过实验测定。
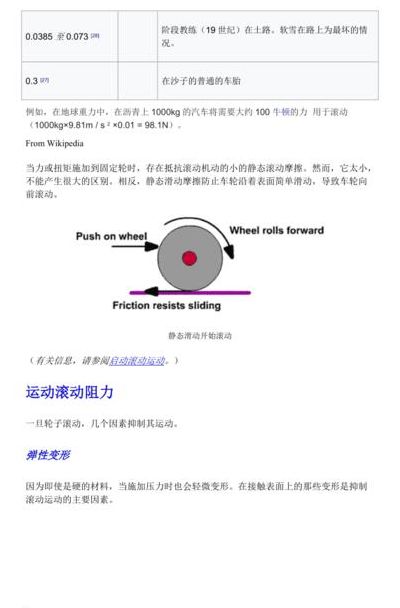
5、滚动摩擦力=正压力*滚动摩擦系数。滚动摩擦力,是物体滚动时,接触面一直在变化着,物体所受的摩擦力。滚动摩擦力实质上是静摩擦力。接触面愈软,形状变化愈大,则滚动摩擦力就愈大。一般情况下,物体之间的滚动摩擦力远小于滑动摩擦力。
静摩擦力,滑动摩擦力和滚动摩擦力的区别是什么?
滚动摩擦是类似于车轮滚动时与地面产生的摩擦,一般来说滚动摩擦力相对于静摩擦力和滑动摩擦力较小。滑动摩擦:当一物体在另一物体表面上滑动或有滑动趋势时,在两物体接触面上产生的阻碍它们之间相对滑动的现象,例如拉箱子,箱子在滑动就产生滑动摩擦力。
产生原因不同:滑动摩擦就是物体沿另一物体表面滑动时产生的摩擦力。静摩擦力是由于物体在另一物体表面上有了运动趋势(实则物体仍处于静止状态)引起的摩擦力。滚动摩擦就是物体在另一物体上滚动时产生的摩擦。
静摩擦力是指物体受到力的作用,而由于有摩擦力没动,当物体受到的力小于等于最大静摩擦力是物体不改变运动状态。比如一个人推木箱,没推动。当物体受到的力大于最大静摩擦力时,称之为滑动摩擦力。
静摩擦力存在于两个有相互运动趋势但没发生相互运动的物体,如静止在斜面上的木块,木块与斜面之间有静摩擦力,才保证木块不会下滑。滑动摩擦力存在于两个相互运动的物体间,如在平面上滑动的木块,它与平面之间有滑动摩擦力。
物体静止且有运动趋势时,接触面阻碍物体运动的力为静摩擦力。物体滑动时,接触面阻碍物体运动的力为滑动摩擦力。物体滚动时,接触面阻碍物体运动的力为滚动摩擦力。
静摩擦力指两个相互静止的物体,因为有相对运动趋势而具有的力;滑动摩擦力是指两个两个相对产生滑动的物体之间的力。滚动摩擦力是指两个相对滚动的物体之间产生的作用力。图中甲因为没有相对运动趋势,不存在摩擦力;图中乙是静摩擦力;图中丙是滑动摩擦力。上图中表现的就是滚动摩擦力了。
滚动摩擦力做功吗?
摩擦力不做功。因为纯滚动,轮与地面接触点处v=0,即没有相对滑动。摩擦力功=0。刚体的纯滚动运动指:当平面为固定平面时,接触点即为两物体的速度瞬心。刚体做纯滚动的条件是切向加速度等于角加速度乘以半径。刚体做纯滚动时摩擦力不做功。摩擦力分为静摩擦力、滚动摩擦、滑动摩擦三种。
摩擦力不做功,因为纯滚动,轮与地面接触点处v=0,即没有相对滑动。
滚动摩擦只是相对于滑动摩擦来说非常小,但是并不是不存在,它产生的原因是由于物体相互接触的表面的微观不平或表面变形造成的。只要在作用力的方向上产生一定的相对位移,就一定会做功,除非物体整体相对静止不动,就不会做功。
文章声明:以上内容(如有图片或视频亦包括在内)除非注明,否则均为网友提供或互联网,转载或复制请以超链接形式并注明出处。




